With the advancement of embodied intelligence technology, humanoid robots are rapidly transitioning from laboratories to industrial applications. However, their development faces numerous technical challenges, including precise control, sensitive perception, coordinated manipulation, and difficulties in navigating complex terrains. six-dimensional force sensor is a core component in humanoid robots’ interaction with the environment, enabling accurate force and torque detection to ensure stable movement and safe operation. In 2024, Haptron Scientific pioneered the market with its optical multi-modal sensing technology, launching the miniature six-axis force sensor Photon Finger and Wrist Joint six-axis force sensor PhotonR40, opening a new frontier in the industry.

During their search for a six-axis force sensor solution, Haptron Scientific’s team encountered multiple challenges, including complex structural design, quality control, and delivery efficiency. Metal 3D printing technology not only enables precision manufacturing of intricate structures but also effectively reduces costs by simplifying production processes and minimizing material waste. With over a decade of production expertise, advanced printing techniques, and robust equipment capabilities, BLT ensures consistent and stable mass production, significantly shortening the overall delivery cycle. This collaboration has empowered Haptron Scientific to overcome critical bottlenecks in sensor development.
Micro Six-axis Force Sensor Photon Finger
This is currently the world’s smallest six-axis force sensor, presenting extreme manufacturing challenges. Given its miniature size and intricate internal structure, traditional machining methods result in high costs, prolonged lead times, and low yield rates. Through collaborative efforts, BLT and Haptron Scientific optimized the structural design by reducing component count and adopting integrated forming. This approach significantly lowered assembly complexity and manufacturing difficulty while maintaining precise internal structures. The optimized process reduced production costs dramatically and shortened the machining cycle to 20 minutes per batch. The integrated manufacturing method greatly enhances production efficiency. While traditional machining can produce only one sensor at a time, 3D printing enables full-panel production of 15-30 sensors simultaneously. Moreover, the sensor’s performance has been substantially improved, with measurement range and overload capacity increased by 50% to 250%.

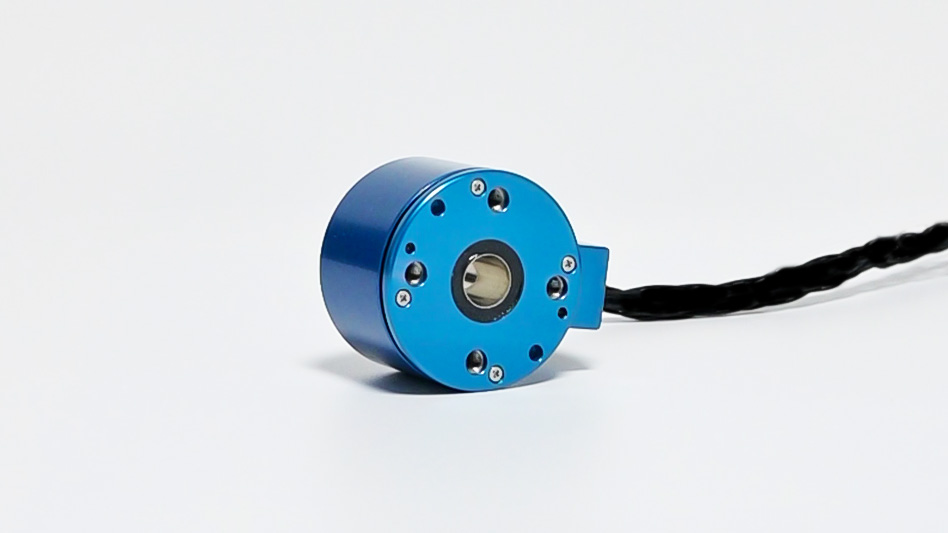
Wrist joint six-axis force sensor PhotonR40
The wrist joint plays a critical role in humanoid robot operations, where lighter six-axis force sensors can significantly enhance flexibility, agility, task efficiency, and battery life. In December 2024, Haptron Scientific introduced its revolutionary PhotonR40 wrist joint six-axis force sensor, featuring a center-through-hole design, dramatically simplifying force-sensing integration in humanoid wrists. BLT enabled the mass production of PhotonR40’s core structure through advanced metal 3D printing. By employing lightweight materials, the sensor achieves 20-30% weight reduction while improving performance, enhancing robot stability and balance. The monolithic 3D-printed design eliminates complex assembly processes while ensuring volume production capacity.
Ankle joint six-axis force sensor
As a vital component for measuring forces and torques during walking, standing, and other movements, ankle six-axis force sensors demand exceptional strength, overload capacity, and reliability. BLT’s advanced printing technology and high-strength, cost-effective steel materials have enabled revolutionary progress in Haptron Scientific’s ankle force sensor development. The optimized sensor features a dramatically enhanced measurement range and overload capacity with yield strength reaching 2400MPa, significantly improving deformation resistance. The current generation sensor achieves an impressive measurement range of 8000N/500N·m and 300% overload capacity, providing robust support for stable robotic operation.


